Drones
The Wooden Quad
For my first quadcopter, I decided I wanted to make my own frame to my own design. I watched a few online videos on how to make your own quadcopters and saw that they used prebuilt frames, but the design of the frame was pretty similar to each other frame; an X pattern.
I bought all my parts and got to making. The images on the left show the kind of thing that went into the construction of the frame with cutting, sticking and screwing. My first mistake however was when mounting the "Flight Controller" to the frame. I mounted it in the + orientation rather than the X because I didn't know what any of that meant. Basically, the X config is better because it is more stable. Having 2 propellers controlling your forward direction is better than 1.
After fixing this issue and having a few test flights (and crashes) I was able to get to an end point with this quad. The main things I learned from this project was the importance of correctly rotating rotors and propellers, wooden frames are heavy and not very agile but they are very steady and can provide a smooth flight, and the motors I have cannot perform a perfect hover. To do this I would need to get some different motors and I decidede to try a new, smaller frame.
The Fibre Glass Quad
The second frame was much faster to make and get everything together on. All the holes and mounting points were basically built into the frame so it was intended to be easy.
The life of this quad was very different to the wooden one however. This quad was made as it looks in the image on the left on the day it arrived, however the green propellers did not provide enough lift to actually get the quad of the ground efficiently. Generally speaking, you want to be able to hover your quad on 50% thrust or below. To even get the quad off the ground I would have to apply 80-90% of thrust. Due to this I put off completing the quad until a long time later. In the meantime, I moved to Germany to do an industrial placement at a company called Fujitsu
Once I got the energy to do it, I fixed up the quad and went for its maiden flight in a park in Germany. The park I was in allowed for a lot of freedom and I could really test it out to about 70% of its performance limt. The reason it was only 70 is that the quad does not have any kind of FPV gear on it so any flying I do is from my point of view and it is very easy to lose track of which was is forward and how to pilot properly. Hopefully my next quad will have this kind of gear so I can see how good my video game skills can transfer into flying
As the day went on I had to trade out batteries so I could keep flying. As the final battery started to run out of juice, I could see the lack of power slowing lowering my quad to the ground. The quad hit land on one of the arms, and while I though it wasn't a hard crash, I saw otherwise when I walked over. I think it was either a flaw in the fibre glass or it grabbed the ground when it landed and bent a bit too much...


FPV and Carbon Fibre (Mk.3)
After many years of not flying and during the first COVID lockdown of 2020, I decided to get back into flying drones as a lot had changed in the technology and the use of cameras made it very appealing!
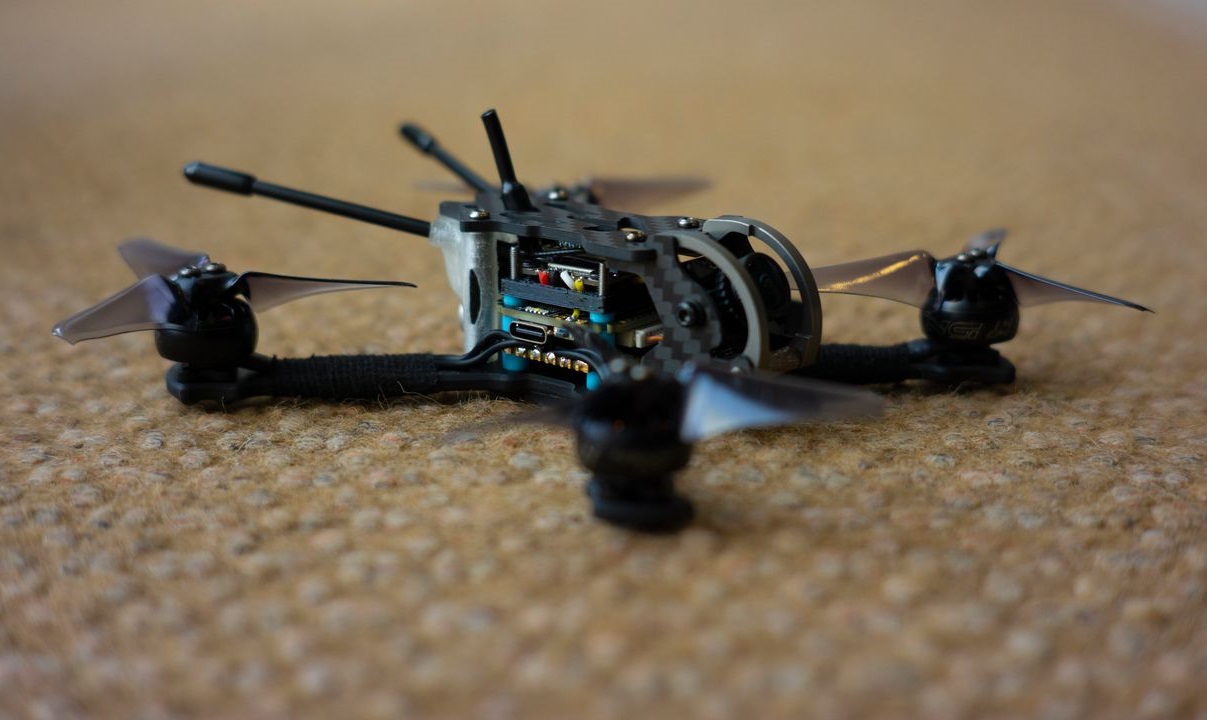
I specced and bought the components to build my first FPV drone, upgraded my transmitter to a more modern one and bought a cheaper solution to goggles (It was a very expensive afternoon!). What I didn't realise at the time was the frame I bought was quite slim meaning fitting all the components in there would be a challenge for my relative inexperience. Construction was tight, but I ensure everything was neat and tidy; organising wires with sleeves and cable ties
One aspect I was very inexperienced with was the new (to me) firmware that runs on the drone. There are a lot of options and adjustments that are required for setting up the transmitter controls, video display settings, power settings, PID settings, etc.
The use of a GoPro for the high quality video to view afterwards was helped with the use of camera filters and a 3D printed mount I designed
Mk.4, Mk.5 and Beyond
Now, after years of experimentation and building, I have a handful of quads for different purposes, most of which I had made.
I have also made a video receiver screen while I was experimenting with long range FPV (which didnt end well, but at least I have a cool screen)